


















A DCC (Digital Command Control / Digitális Parancsvezérlés) története
A DCC világa elsőre nehezen érthető lehet, ezért szeretnék részletesen írni róla. Hogy miért olyan lett, amilyen, azt a történetéből lehet megérteni. Ez talán közvetlenül nem árul el semmi gyakorlati haszonnal rendelkező információt, mégis úgy érzem, ezzel érdemes kezdeni, mivel a kifejlesztés körülményei megmutatják, milyen filozófiai meggondolások álltak a háttérben a kifejlesztésekor, a megoldandó problémák megismerése segít elképzelni, mire is lehet használni ezeket a rendszereket, és végül, hogy mi az a rengeteg képesség, amit sokan talán nem is használnak még ki a DCC rendszerük esetén.
Az első modellvasutak egyenfeszültségű vagy váltófeszültségű, de mindenképp analóg táplálásúak voltak. Ezeknél a megoldásoknál nem a vonatot, hanem a pályát vezéreljük, például a két sínszálra adott feszültséggel, és minden, az adott pályaszakaszon tartózkodó mozdony az oda kapcsolt feszültségnek megfelelően fog mozogni. Ez azt jelenti, hogyha egy adott feszültségszabályozóról táplált szakaszon két mozdony is tartózkodik, akkor a szabályzó eltekerésével mindkét mozdony mozgásba lendül, ugyanabba az irányba, viszont a mozdonyok ellenállásától függően eltérő sebességgel.Ez a megoldás több problémát is okoz. Egyrészt több mozdony független vezérléséhez több, egymástól elszigetelt pályaszakasz és több feszültségszabályozó kell. Másrészt komplikált megoldni, hogy az egyes feszültségszabályozók mindig a megfelelő vágányszakaszhoz kapcsolódjanak. Erre számos nagyjából működő, ám időrabló megoldás volt, kezdve azzal, hogy minden szabályzóhoz banándugót kapcsolunk, majd a vágánynak megfelelő banánhüvelybe dugjuk be, folytatva a rádiók csatornaválasztó-gombjainak használatával, egészen odáig, amikor minden nyíltvonali pályaszakaszhoz tartozik szabályzó, az állomások is föl vannak osztva, és ilyenkor csak úgy lehet egyik "körről" a másikra áthaladni, ha a szabályzók azonos állásban vannak. Erre létezett az a trükk, hogy a szabályozási körzetek határaira egy izzót kapcsoltak, ami ha világított, a szabályzók állása túlságosan eltérő volt.
Korai megoldások
Már a gimnazistaként épített terepasztalomon is fontosnak tartottam, hogy a valóságos üzem elemei megjelenjenek. Ezért a veszprémi állomáséhoz hasonló  teherpályaudvart építettem, az állomásra pedig egy csonkavágányt, ahol így hosszabb vonat is elfért, és egy tolatómozdony kihúzhatta a szerelvényt, a vonat vonómozdonya kijárhatott onnan, majd a szerelvény visszatolása után újra rájárhatott a vonatára. Ehhez csak két részbe kellett szigetelnem a csonkavágányt, de ez is elég sok plusz vezetékezést jelentene, ha minden vágányon megcsinálnám, illetve, ha a 120*150 cm-es méretnél nagyobb modellvasutam lett volna. Ráadásul a kiszigetelt szakasznak hosszabbnak kell lennie, mint a leghosszabb használt mozdonynak. Nálam csak egy Nohab-hosszúságú volt, tehát ha ma, húsz évvel később, vettem volna egy Vectront, azzal máris nem működött volna a trükk.
teherpályaudvart építettem, az állomásra pedig egy csonkavágányt, ahol így hosszabb vonat is elfért, és egy tolatómozdony kihúzhatta a szerelvényt, a vonat vonómozdonya kijárhatott onnan, majd a szerelvény visszatolása után újra rájárhatott a vonatára. Ehhez csak két részbe kellett szigetelnem a csonkavágányt, de ez is elég sok plusz vezetékezést jelentene, ha minden vágányon megcsinálnám, illetve, ha a 120*150 cm-es méretnél nagyobb modellvasutam lett volna. Ráadásul a kiszigetelt szakasznak hosszabbnak kell lennie, mint a leghosszabb használt mozdonynak. Nálam csak egy Nohab-hosszúságú volt, tehát ha ma, húsz évvel később, vettem volna egy Vectront, azzal máris nem működött volna a trükk.
Progressive Cab Control
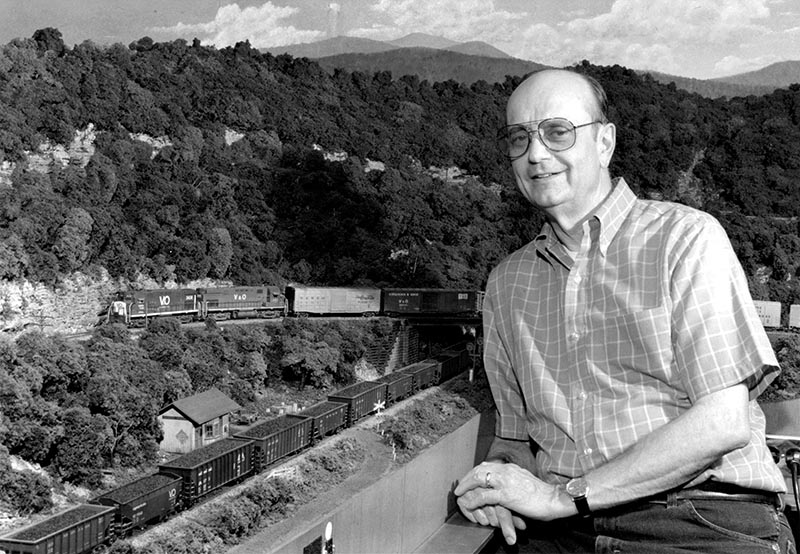
Elsősorban az Egyesült Államokban jelent meg - de nem terjedt el igazán széleskörűen - az egyenfeszültségű kézivezérlős megoldás a fenti problémák egy részére. John Allen nyomán egyre nagyobb, hosszabb, a valóságosakhoz hasonlatosabb vonalvezetésű modellvasutak épültek. Allen McClelland Virginian&Ohio modellvasútja egy komplett vasútvonalat modellezett, jópár állomással, rendezőpályaudvarokkal, tárolópályaudvarokkal, és minden településnél több iparvágánnyal, rakodóval. Ez a példa gyorsan nagy népszerűségre tett szert, de igazán úgy volt izgalmas egy ilyen modellvasúton vonatokat közlekedtetni, ha több operátor is dolgozott, mindenki a saját vonatával.
A kézivezérlős megoldás lényege az, hogy az egyes szigetelt szakaszokra kapcsolandó feszültséget egy központi egység megjegyzi, és a kézivezérlőt egy állomásnál ki lehet húzni a csatlakozójából, és át lehet sétálni a következő állomáshoz. Eközben a közbülső nyílt vonalon a vonat állandó sebességgel halad tovább. Ezzel csak két probléma volt: egy állomáson csak egy operátor dolgozhatott, és nagyon komplikált volt egy ilyen rendszert megépíteni.
Nagyfrekvenciás többcsatornás vezérlés
Az elektromágneses spektrum különböző frekvenciájú jelek kakofóniája, de egy egyszerű rádióvevővel megoldható, hogy egy hangszóróra a tekercsekkel és kondenzátorokkal kiválasztott frekvenciának megfelelő jel jusson, és csak annak a rádióadásnak a jele legyen hallható (minimális amplitúdóval a többi is jelen van). Ugyanígy lehetséges több különböző jelforrást kapcsolni a vágányra, és minden mozdonyt egy kiválasztott frekvenciára hangolni egy rezgőkörrel, és így mindegyik a megfelelő jeladó által generált jelnek megfelelő sebességgel fog mozogni. Ez az analóg parancsvezérlési megoldás azt jelentette, hogy nem kellett szigetelni egyetlen vágányszakaszt sem. Minden mozdony egymástól függetlenül mozoghatott, vagy éppen állhatott egy helyben. Ehhez csak megfelelően hangolt vezérlőegységek kellettek, megfelelően hangolt, komplikált, és nyilván egyedileg épített áramkörök a mozdonyokba, és sajnos a rádiós szabványok nem engedtek meg túl sok különböző csatornát, amit lehetett volna használni. Feltétlenül kevesebbet, mint amennyi mozdonya egy megszállott modellezőnek volt. Ez a megoldás az 1960-as években lett ismert, ezt megelőzően néhány kevéssé jól működő rádiótávirányításos megoldás volt ismert csak. A többcsatornás vezérlést később félvezető alkatrészekkel egészítették ki, így a vevőegység kisebb lehetett, de kevés országban árulták csak kereskedelmi forgalomban. Elterjedésüket akadályozta, hogy a kisebb, asztal formájú terepasztalokról ismert Európában a komplikált megvalósításhoz képest nem adott túl sok előnyt ez a fajta rendszer, míg a nagyobb modellvasutakon Észak-Amerikában a vonat követését lehetővé tevő Progressive Cab Control jobban illeszkedett ahhoz, ahogy az emberek használták a modellvasútjukat. Magyarországon is épültek valószínűleg nagyfrekvenciás többcsatornás vezérléssel asztalok, mivel Linzbauer Tamás Vasútmodellezés című könyvében részletesen leírja a rendszer működését és méretezéssel és rajzokkal segíti egy ilyen rendszer megépítését. A Progressive Cab Control itthoni történetéről nem tudok, inkább az a megoldás volt elterjedt, hogy mindenhol külön (például FZ1) tápegység volt, és lámpa vagy vörös LED világított, ha nem a következő szakasszal megegyező feszültségre volt állítva.
A két rendszer előnyeit ötvöző megoldásra még várni kellett.
Korai digitális technológiák
Az egyik első kifejlesztője a digitális modellvasúti vezérlésnek a Märklin egyik beszállítója, az akkor aránylag kevéssé ismert Motorola volt. A háromsínes, váltófeszültségű modellekkel alkalmazható rendszerről először 1979-ben beszélt Nürnbergben a modellgyár, de kereskedelmi forgalomba végül csak 1985-ben (a szerző születésének évében) került. A rendszer hosszú ideig meghatározó volt a háromsínes rendszerben, megjelent a Motorola II protokoll, az olcsósított Delta Digital (mechanikusan beállítható dekódercímmel és legfeljebb 4 mozdonnyal), majd 2004-ben az ESU által kifejlesztett mfx-re cserélték le (ez Märklin Digital márkanéven fut).
Kétsínes vonalon népszerű rendszert fejlesztett a brit Hornby Zero néven, de volt ilyenje a Fleischmannak, a ZIMO-nak és a KATO-nak is. Ezek legtöbbször úgy működtek, hogy az egyik sínszálra fix potenciált kapcsoltak, a másikra pedig egy ahhoz képest fix feszültségre egy néhány voltos digitális jelet ültettek. Ez egyszerű architektúra volt, de elég zavarérzékeny, csak tökéletesen megépített pályával, megfelelő bekötésekkel működött jól még aránylag egyszerű esetben is. Több rendszer alig néhány évvel a megjelenése után el is tűnt, cserben hagyva azokat, akik komoly pénzt fektettek a vasútjuk és vonataik adaptálásába. Egy jól ismert kivétel volt csak, mégpedig a Märklin kétsínes digitális rendszere, amely jól működött, és valószínű volt, hogy nem is tűnik el.

Egy néhányak által ma is használt dinoszaurusz, a Dynatrol parancsvezérlés
Ennél három pólust használtak, a földet, és a földhöz képest két azonos vagy pozitívabb potenciálú jelvezetéket. A két jelvezetékben mindig inverz fázisban volt a digitális jel (ha az egyikben bináris 1, a másikban bináris 0). Viszont mivel sín csak kettő volt, csak a két ellentétes fázisú négyszögjelet vezették ki (ez így egy úgynevezett differenciális jeltovábbítás), a négyszögjelek felfutó és lefutó éleinek magassága pedig a teljes feszültségtartomány volt. Emiatt a jelek érzékelése sokkal egyértelműbb lett, és még egyszerű szőnyegvasutakon is sikeres lehetett. Ezt a digitális rendszert a Märklin egy másik beszállítója fejlesztette ki, egy bizonyos Bernd Lenz, és valószínűleg sokan ismerik a történetet, hogy ez a rendszer lett a DCC (Digital Command Control - Digitális Parancsvezérlés) alapja.
A DCC megjelenése
Az NMRA DCC munkacsoport
nyolcvanas évek végén Bob Keller, az Onboard analóg parancsvezérlés kifejlesztője egy új digitális parancsvezérlés protokolljával kereste meg az Egyesült Államok-beli National Model Railroad Association-t (Nemzeti Modellvasúti Egylet - NMRA), és javasolta, hogy a szervezet fogadja azt a szabványává. Ha a protokoll szabványosított lenne, nem kellene félni attól, hogy egy gyártó döntése vagy csődje esetén eltűnik a rendszer támogatása. Ez logikusan hangzott, de az alig kipróbált rendszer a szabvánnyá válás közelébe sem jutott.
1991-ben Tom Catherall javasolta a Märklin kétsínes digitális rendszerét a szabvány alapjának, amit az NMRA-nál ígéretesnek találtak. Innen a sztori úgy folytatódik, hogy az NMRA rávette Lenz-t, hogy tegye szabadon felhasználhatóvá a rendszerét, esetleg úgy, hogy az NMRA megvásárolta a Lenz-féle rendszert, és így lett a DCC. Ezek közül azonban egyik sem igaz.
A Lenz-rendszer jeltovábbítási technikáját valóban a többiek megoldásaihoz képest jobbnak tartotta az NMRA, ezért megalapította a DCC munkacsoportot, amely ezen az alapon kezdte el a DCC szabványait és javasolt megoldásait kifejleszteni (Standards and Recommended Practices). A Lenz által definiált adatcsomag képességeit azonban már akkor kevésnek tartották. Elkezdték fölmérni, mit kellene tudnia egy olyan rendszernek, amely már érdemes arra, hogy szabvány legyen belőle, majd a fölmérés alapján alaposan átdolgozták az adattovábbítást. Ennek köszönhető, hogy a mai DCC központok még a rengeteg hangdekóderes funkcióval, a különböző világítási lehetőségekkel, vagy a funkciódekóderekkel is megbírkóznak. A kialakított szabvány alig hasonlított az eredeti Lenz-féle megoldásra, szinte csak a fizikai modellben (informatikusul: OSI fizikai rétegben), ami azonban nem szabadalmaztatható, így az NMRA teljes jogú tulajdonosa lett a DCC szabványoknak és javasolt megoldásoknak. Néhány olyan technika, amely az eredeti Lenz-Märklin rendszerhez nagyon hasonló, ki is maradt a szabványokból. Ilyen például a hírhedt nullás mozdonycím: a Digitrax vagy a Roco Lokmaus 1 rendszer is képes a 0 címen egy analóg, dekóder nélküli mozdonyt vezérelni, amely a DCC kezdeti térhódításakor hasznos funkció volt, és részben indokolta Lenz választását a differenciális jeltovábbítás kapcsán, de a DCC-szabványnak nem lett része, így elkerülve a szellemi tulajdon megsértését.
Mivel a nullás cím nem része a szabványnak, nem kötelező minden rendszernek ismernie. A DCC térnyerésének idejében és részben ma is fontos azonban, hogy a dekóderrel szerelt mozdonyok valamilyen szinten működjenek analóg vezérlésű modellvasutakon is. Az, hogy egyes DCC rendszereken analóg mozdony is közlekedhet, és a legtöbb DCC mozdony analóg asztalon is működik, számos problémát okoz, amelyek egy része elég drága is lehet. Ezekről az anomáliákról később külön cikkben fogok írni.
Az NMRA birtokában van Bernd Lenz egy levele, amelyben leírja, hogy az ő szellemi tulajdonát a DCC szabványai nem érintik. Ezt persze abban az értelemben könnyedén írhatta meg, hogy mivel a jeltovábbítás az ő rendszerén alapul, neki kellett a legkevesebbet fejlesztenie, hogy DCC rendszert készítsen, így kezdetben nagyon komoly eladásai voltak. Különösen a Lenz dekóderek nagyon sokáig a legjobb minőségűeknek számítottak, de nevéhez fűződik a Roco Lokmaus 2, MultiMaus és Z21 rendszerek vezérlői és erősítő/központ közötti kommunikációjában fontos XPressNet-protokoll kifejlesztése is.
A DCC ma (de csak röviden)
A DCC teljes jelentőségét nem lehet egy történeti áttekintés zárszavaként teljes mértékben megmutatni, ezért ezzel is még külön foglalkozni fogok. A mai helyzetről annyit mondanék, hogy ideális esetben egy digitális rendszer úgy működik, hogy bármely digitális mozdony könnyedén vezérelhető rajta, a dekóder programozása könnyű, az akár tucatnyi funkciók elérése érintőképernyőn egyszerű, a hangfunkciók pedig a valóságnak megfelelően vannak jelen, és segítik a valósághű működtetését a mozdonynak. Személyes véleményem az, hogy a DCC rendszerek nagyjából harmadik generációjának végén vagyunk, és már elkezdtek megjelenni a negyedik generációs megoldások, például a TCS CS-105, de ehhez a legmodernebb korhoz tartozónak gondolom a ProtoThrottle kézivezérlőt is, amivel tulajdonképpen egy valódi dízel-elektromos mozdony vezetőállásában érezhetjük magunkat. A generációk beosztása részemről önkényes, szívesen veszem, ha valaki jobb beosztást javasol!
Az is igaz, hogy a negyedik generáció képességeinek egy része az átlagos (európai) otthoni modellvasutaknál teljesen szükségtelen. Valószínűleg egy DCC-rendszer élettartamán belül a harmadik generációs rendszerek még a legtöbbek számára jó választások, így európai negyedik generációs rendszer híján sem kell senkinek visszariadnia a digitális vasútmodellezés elkezdésétől. Azt ugyanakkor fontosnak tartom, hogy az elavult, a DCC rövid történetének hosszához arányosítva a régmúltból ittmaradt rendszereket már kár erőltetni, azokba kár befektetni.
A DCC-rendszerek generációi
Első generáció

- A DCC-szabvány kialakulásakor jelentek meg
- Limitált számú, és csak rövid címet, és nagyon kevés funkciót támogatnak
- Nincs lehetőség speciális eszkök vagy számítógép csatlakoztatására
Ilyen rendszerek: Nyilván minden korai Lenz, amik itthon alig ismertek, Roco Lokmaus 1 (képes egy analóg mozdony irányítására, de ez nem javasolt üzemmód), Uhlenbrock Intellibox , Bachmann EZ-Command
Második generáció

- Némelyikük képes rövid (két számjegyű) mellett hosszú (4 számjegyű) címek földolgozására is
- Némelyikük képes négynél több (vagy akár 31) funkció használatára is, de többnyire csak a SHIFT gomb többszöri lenyomásával, ami elég lassú és fárasztó
- Nem túlságosan modulárisak
- Némelyik rendelkezik számítógép-csatlakozással
- Némelyik lehetővé teszi a vezeték nélküli kézivezérlők használatát
- A programozás és más funkciók elérése sok gombnyomással jár, a menük komplikáltak, a kezelőfelületek a kétezertizes évek okoseszközeihez képest fejletlenek
A második generációba széles termékskála tartozik, sok eszköz kezdetben alig rendelkezett funkciókkal, de utána továbbfejlődött. Az ide tartozó eszközök azonban sosem érték el a harmadik generáció színvonalát. Ennek ellenére majdnem minden második generációs rendszer beszerezhető még, sőt, egyes első generációsok is.
Második generációs DCC rendszerek: Roco Lokmaus 2 , Roco Multimaus (a legutóbbi firmware-frissítés nélkül), Uhlenbrock Intellibox 2 , ESU EcoS , Trix CS, Trix MS , Bachmann Dynamis , Digitrax Zephyr , NCE PowerCab , Digitrax Chief et. al. , NCE ProCab
Harmadik generáció

- Moduláris rendszerek (a parancsközponthoz kábeles és rádiós fizikai vagy okoseszközön futó kézivezérlő is használható)
- Akár több kommunikációs protokollt is támogatnak
- Akár intelligens Booster-vezérléssel is rendelkeznek
- A programozás, funkcióhasználat intuitív, nem kell a funkciók sorszámát megtanulni vagy a dekóderben átprogramozni
- Akár belső együttes járművezérlést is tudnak, nem kell a közös vezérléshez a dekódereket programozni
- Akár építési nagyságtól függően különböző kimeneti feszültségekkel is működnek
A fenti funkciók mindegyikével csak a Roco fekete Z21 rendelkezik. További ilyen rendszerek: fehér z21 , Digikeijs DR5000 (pár hete mentek csődbe), Yamorc (várhatóan), ESU MobileControl
A legújabb Roco MultiMaus Firmware már 31 funkciót is lehetővé tesz, de már csak z21/Z21 parancsközpontokkal használható, önmagában a 10765 erősítővel nem.
Hibrid rendszerek
A hibrid rendszerek rendelkeznek az újabb generációk néhány képességével, de olyan módon valósítják meg őket, amely jelentős kompromisszumokkal jár. Ide jelenleg azok a mozdonydekóderek tartoznak, amelyeket DCC mellett lehet okoseszközről BlueTooth-szal is vezérelni (az egyenfeszültségű vezérlés károsodást okozhat), azonban a tápfeszültség elvesztésekor hosszú idő, mire újraindulnak. Programozásuk nagyon könnyű App-pal, BlueTooth rendszeren keresztül, de vezérelni őket megbízhatóbban lehet hagyományos, a sínben továbbított DCC jellel.
Ilyen hibrid rendszerek: SoundTraxx Blunami , Hornby HM-7000
Negyedik generáció

, de az csak részben felel meg a fentieknek. Ennek oka, hogy csak a limitált képességű, a JMRI szoftvercsomaggal kompatibilis WiThrottle okoseszközös kézivezérlővel lehet vonatokat vezetni rajta és programozni, ami képességeiben még elmarad a Hornby és Roco rendszerektől. Ugyanakkor rendelkezik a jövőbemutató LCC (Layout Command Control) kapcsolattal, amivel közepes és nagy modellvasutakat lehet rendkívül rugalmasan, szerteágazó eszközökkel, mégis szabványosan vezérelni. Az LCC a házinál nagyobb modellvasutak jövője (kisebb rendszerekhez még túl komplikált, és a Roco/Digitools DCC-alapú dekódereivel teljesen kiváltható), ezért az új DCC rendszer-generációt a TCS CS-105 nyitotta meg.
Elhiszem, hogy ezt végigolvasva sok-sok kérdés van a fejedben. Sajnos a modellezés, modellvasutazás nem megkerülhető része, hogy utána kell olvasni a dolgoknak, az első néhány száz oldalig még kissé zavaros az egész. Amikor modellvasutat akarsz építeni, kérdés a vezérlés, a terep, a járművek, és még sok minden más; ezeket a témákat meg kell ismerni, különben az asztalod összecsapott lesz. Persze az is lehet, hogy olyan típusú ember vagy, aki menet közben ismeri meg a dolgokat, ekkor beleugorhatsz bátran, csak legyél arra kész, hogy néhány hónapon vagy éven belül nulláról újra kell kezdened az egészet. De ez nem baj - a legtöbb tapasztalt vasútmodellező már a sokadik asztalánál tart!
Címlapkép forrása: By PRZ (JPEG version), WhiteTimberwolf (SVG version) - JPEG version, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=28202929, CC BY-SA 3.0, Link